利用神经网络拟合一元二次方程

我们这次要拟合的关系是一个一元二次方程

目标
- 理解参数初始化对于模型效果的重要影响。
- 学习模型训练过程中,如何通过观察损失值相应的调整学习率、epoch大小。
数据构建
这次我们在准备数据的时候,就将数据进行划分好,总训练集100个,训练集90个,测试集10个。
# 生成准备y = x^2 + 2x + 1数据,共100个点,并按9:1的比例划分为训练集和测试集,并保存到CSV文件
import numpy as np
from sklearn.model_selection import train_test_split
# 生成输入数据
x = np.linspace(-10, 10, 100) # 在[-10, 10]范围内生成100个均匀分布的点
# 生成目标输出数据
y = x**2 + 2 * x + 1
# 划分为训练集和测试集
x_train, x_test, y_train, y_test = train_test_split(x, y, test_size=0.1, random_state=42)
# 保存训练集数据到CSV文件
train_data = np.column_stack((x_train, y_train))
np.savetxt('train.csv', train_data, delimiter=',', header='x,y', comments='')
# 保存测试集数据到CSV文件
test_data = np.column_stack((x_test, y_test))
np.savetxt('test.csv', test_data, delimiter=',', header='x,y', comments='')
print("数据保存成功!")训练集准备好之后,得到train.csv和test.csv两个数据集,分布做训练和测试验证用。
现在开始构建神经网络,以拟合数据集中未知的关系。尽管我们清楚这个数据集是由一元二次方程生成的,但为了模拟实际情况,我们要有意地“忘掉”这一点。假设我们面对的是一个完全未知的数据集,不清楚其中的模式或潜在规律,这就要求我们不能直接进入模型构建环节,而是先对数据进行全面的探索和分析。
现在开始实验,此时我们面对的是(x,y)的数据点,但是并不知道他们的关系,目标是构建一个神经网络来拟合潜在关系。
数据探索与可视化
老规矩,先进行数据探索和数据可视化。
import matplotlib.pyplot as plt
# 读取data.csv文件到本地变量x和y中
import numpy as np
data = np.loadtxt('train.csv', delimiter=',', skiprows=1)
x = data[:, 0]
y = data[:, 1]
# 可视化数据
plt.scatter(x, y, color='green', label='data-exploit')
plt.xlabel('x')
plt.ylabel('y')
plt.title('data exploit')
plt.legend()
plt.show()可以看到,(x,y)的关系并不是一个线性或近线性关系,因此用在构建模型的时候,不能直接用线性模型进行构建,而需要引入非线性部件,也就是隐含层和激活函数。

模型构造
# 定义模型方法,简单线性模型,无隐含层
def build_linear_model():
model = keras.Sequential([
layers.Dense(1, input_shape=(2,)) # 只有输出层
])
return model模型训练
为了能够清晰看到每轮epoch误差的走势,我们将误差进行可视化,按照理想的情况,误差应该是逐步降低,并且趋于一个较小的值。


在图中可以看到,轮次在1000左右,误差开始区域平稳,并没有下降了,而误差大小却还是900多,这也验证了在数据探索时看到的,这个数据集并不是一个简单的线性关系,线性模型无法很好的拟合,表现出来也是误差偏大
既然简单的线性模型误差偏大,那么就需要增加模型复杂度,增加隐藏层和激活函数,来拟合非线性关系
# 定义模型方法,包含隐含层,用pytorch的模型方法来定义
class LinearModel(nn.Module):
def __init__(self):
super(LinearModel, self).__init__()
self.layer = nn.Sequential(
nn.Linear(1, 16),
nn.ReLU(),
nn.Linear(16, 1)
)
def forward(self, x):
return self.layer(x)
# 固定初始权重和偏置,例如权重为 0.5,偏置为 0.1
with torch.no_grad():
model.layer[0].weight.fill_(0.5)
model.layer[0].bias.fill_(0.1)
model.layer[2].weight.fill_(0.5)
model.layer[2].bias.fill_(0.1)选择隐藏层中的单元(神经元)数量确实是一个重要的超参数,直接影响模型的表达能力和训练效果。没有固定的公式来选择最优的神经元数量,但可以考虑以下几方面来做出合理的选择:
- 简单任务:通常从 8、16 或 32 开始测试。如果在这些较小的神经元数量上表现良好,就不需要再增加。
- 非线性关系且复杂任务:可以尝试 32 或 64,但一般来说超过 64 会显得多余,尤其是在单层隐藏层的情况下。
逐步调试和验证
- 选择一个小的神经元数量(如 8 或 16),观察模型的表现。
- 更少的神经元数量意味着更少的参数,这会降低计算复杂度,提高训练速度,同时也能减少过拟合的风险。
- 在神经元数量过多时,模型可能学到数据中的噪声和细节,导致过拟合。
因为在数据探索可视化步骤中已经看到了数据的非线性关系,因此我们从16个神经元数量开始
激活函数Relu、学习率0.001、轮次100开始训练,并观测成本的走势

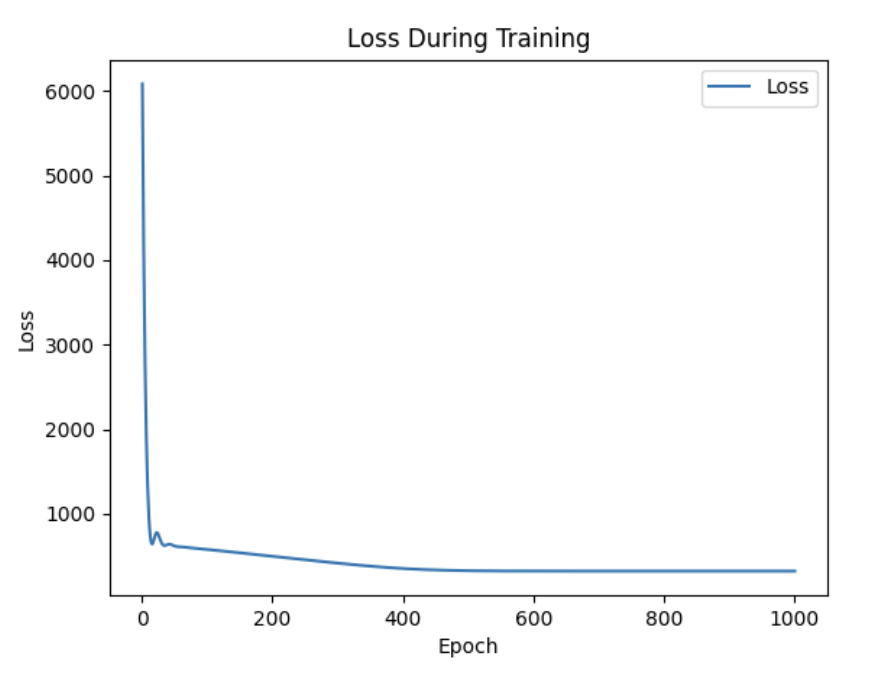
可以看到Loss一直是下降趋势,并没有到达一个平缓值,也没出现抖动,我们继续增加训练轮次到500

成本在300 epoch后下降趋势变得平缓,无法继续收敛,此时的损失输出。
可以看到模型Loss已经到达瓶颈,在300多处无法再下降了,此时模型还是处于误差偏大的情况,应该增加模型复杂度,我们先考虑增加隐藏层单元数,试试效果,将16增加到32
self.layer = nn.Sequential(
nn.Linear(1, 32),
nn.ReLU(),
nn.Linear(32, 1)
)
损失快速下降,并且未出现瓶颈,继续增加epoch大小到1000。

epoch增加到1000看到下降趋势仍然明显,并且毫无平缓趋势,表示还未到达最小值附近,轮次虽然增加了一倍,但损失值没有显著降低,收敛速度较慢,因此将学习率从0.001调整为0.01,加速收敛过程,看看效果。

整体变化不大,继续调整0.01到0.1,加速收敛过程,看看效果。

效果非常明显,epoch在200左右开始,损失曲线进入平滑,但是此时损失值还在300以上,虽然效果并不是很好,但是以上对于学习率的尝试,可以感受到对收敛速度的影响。

面对这个损失值趋于平缓,且值较大,会猜测是否是学习率过大,导致未能很好的收敛至最小值,或者是模型复杂度不够,无法表达出数据的复杂关系。
先来验证第一个猜想,降低学习率,并且增大epoch次数,让模型在较小的学习率上,足够轮次去学习,看看能收敛到什么效果。尝试多轮试验,在0.001的学习率,epoch为30000时,足够小的学习率和足够多的轮次,损失曲线走向平缓,但是可以看到,损失值还是在300以上,足以验证并非时学习率导致未能收敛至最小值。



再来验证第二个猜想,增加模型复杂度,增加一个隐藏层。
self.layer = nn.Sequential(
nn.Linear(1, 64),
nn.ReLU(),
nn.Linear(64, 1)
)Loss值依然很大,单纯通过增加隐藏层单元数作用不大。

考虑继续增加模型复杂度,增加隐藏层数量,从一个隐藏层增加到两个隐藏层
self.layer = nn.Sequential(
nn.Linear(1, 32),
nn.ReLU(),
nn.Linear(32, 16),
nn.ReLU(),
nn.Linear(16, 1)
)

损失值依然还是处于高水位。
我们通过改变学习率、神经单元数,对Loss值的改变都没什么作用,陷入沉思。
仔细思考我们的模型,会发现,模型的初始化参数时手动设置的。
# 固定初始权重和偏置,例如权重为 0.5,偏置为 0.1
with torch.no_grad():
model.layer[0].weight.fill_(0.5)
model.layer[0].bias.fill_(0.1)
model.layer[2].weight.fill_(0.5)
model.layer[2].bias.fill_(0.1)仔细思考,会发现手动初始化参数会有一个问题,每层所有的神经单元权重和更新都是一样的,只是一个单元的复制,因此无论单元数是8,还是64,本质都只是1,模型的表达能力大大退化,无法展示出复杂的表达能力。
恍然大悟,通过随机初始权重来替代手动初始化,用最初最简单的模型结构训练,看看效果
# 使用随机初始化的方法,替代 np.full 的固定值
self.layer = nn.Sequential(
nn.Linear(1, 64),
nn.ReLU(),
nn.Linear(64, 1)
)
# 注释掉手动设置参数的逻辑
# with torch.no_grad():
# model.layer[0].weight.fill_(0.5)
# model.layer[0].bias.fill_(0.1)
# model.layer[2].weight.fill_(0.5)
# model.layer[2].bias.fill_(0.1)
Final Loss效果十分明显,证实我们的猜想是正确的。我们通过自动初始化,即如He初始化或Xavier初始化
之前设置的偏重和权重数是随意设置的,偏重0.5、0.1,现在不自己设置,改为由自动生成,看看效果
很神奇的一幕出现了,Loss居然一下子到达了从323多下降到0.24,效果惊人。
正常的梯度值应该是:
某一层的平均梯度可能从最初的较大值(比如 0.1 - 1)逐渐减小到 0.01 - 0.1 左右,随着训练的进行波动幅度也逐渐缩小。
注意一个情况,即每次运行可能得到的Final Loss值会不一样,原因是模型中存在几个随机给变量,分别是:Adam动量、随机初始化权重、偏重。这些都是影响模型效果的变量,面对随机变量,只要设定一个目标值,达到目标值之后就可以将模型保存。
面对当前目标,我们认为final loss在1以下就是可以接受的范围,这里没有一个定论,而是要与你实际的场景相结合,当目前final loss = 0.2,由于我损失函数用的是mean_squared_error,0.2开根号= 0.45,即预测误差会在大约0.45范围,这个是我可以接受的范围。
测试验证
接下来就是在测试环境进行模型验证:
# 测试集验证
import torch
from nonlinear_train_pt import NonLinearModel
import numpy as np
import torch.nn as nn
# 从data.csv文件中读取数据
def load_data(file_path):
data = np.loadtxt(file_path, delimiter=',', skiprows=1)
x = data[:, 0]
y = data[:, 1]
return x, y
if __name__ == "__main__":
# 加载数据
x, y = load_data('test.csv')
x = torch.tensor(x, dtype=torch.float32).view(-1, 1)
y = torch.tensor(y, dtype=torch.float32).view(-1, 1)
# 加载模型
model = NonLinearModel()
model.load_state_dict(torch.load("nonlinear_model.pth", weights_only=True))
criterion = nn.MSELoss()
# 训练后评估模型
model.eval()
final_loss = criterion(model(x), y).item()
print(f"Test final loss: {final_loss}")
Final Loss一下退后了好几个小数点,效果十分显著。
在测试集上进行验证,注意,模型是在标准后的数据上进行训练得到的,因此测试验证时,也需要利用训练数据的标准化参数进行处理。
运行之后得到结果发现,在标准化后的数据上效果很好,但是在真实数据集上去衡量,效果却远达不到。从下图可以看到,利用标准化数据进行预测,Loss在0.00138、而在真实值上预测,却在1.22,差了很多
总结
整体思路(从简单到复杂,更简单的模型部署、推理成本更低):
数据探索可视化 -> 非线性模型 -> 2层 -> 调整轮次、学习率 ->效果不佳 -> 自动初始化 -> 效果变好 -> 继续优化,数据标准化 ->标准化测试效果好,但真实值效果不好 -> 不用标准化,增加模型层数到3层 ->效果达标。